




Manipulator mit Klemme
Einführung
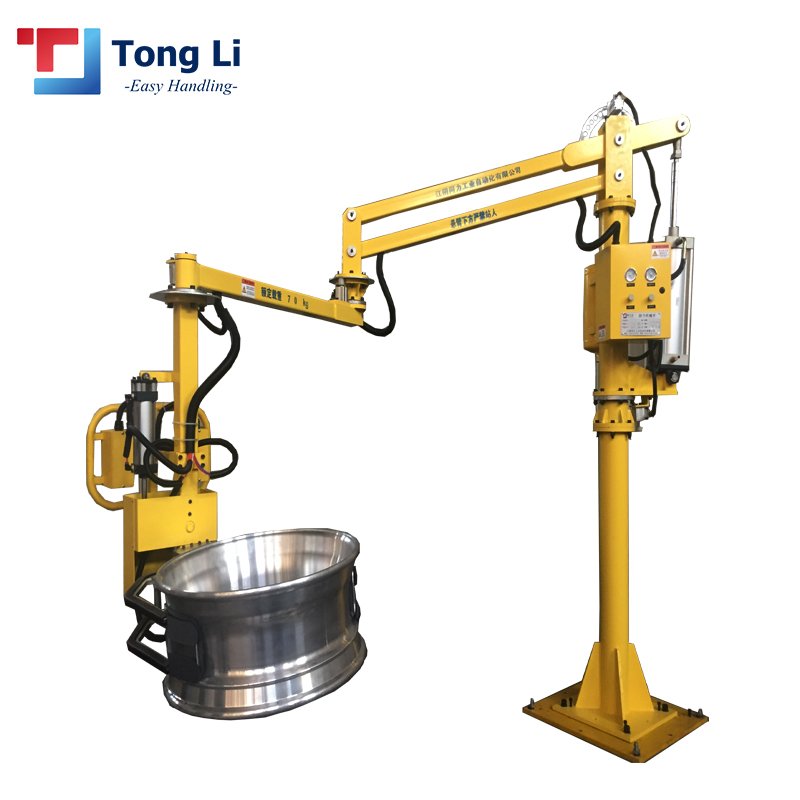
a) Der gleiche Kraft-Hartarm-Assistenzmanipulator kann verschiedene Gewichte von 2 bis 500 kg ausbalancieren.
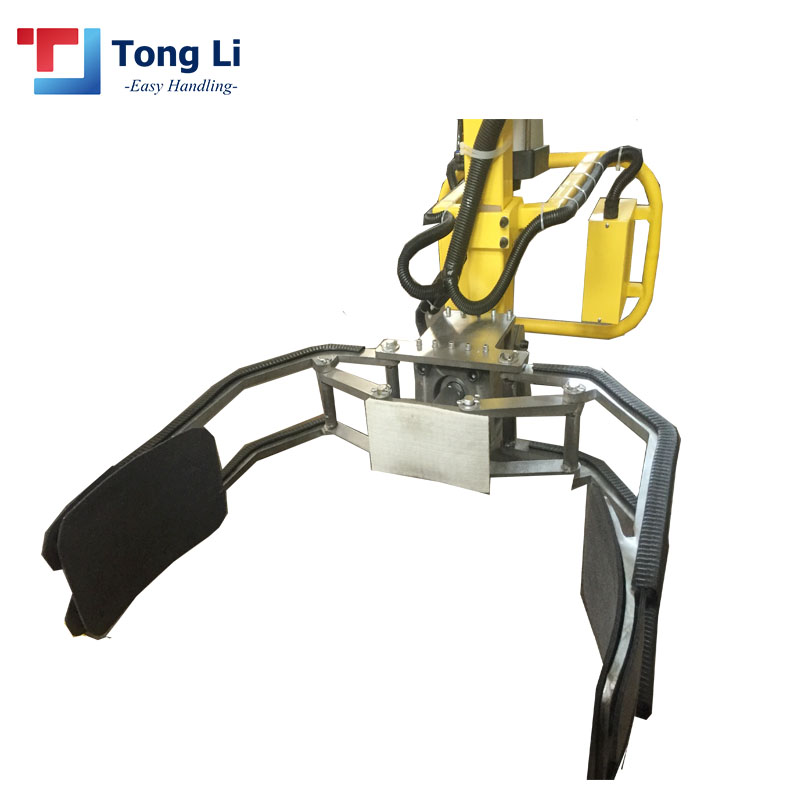
b) Der kraftunterstützte Manipulator besteht aus einem Gegengewichtsträger, einer Greifvorrichtung und einer Installationsstruktur.
c) Der Manipulator ist das Hauptgerät, das den schwerelosen Schwebezustand von Materialien (oder Werkstücken) in der Luft realisiert.
d) Der Manipulator ist das Gerät, das das Greifen des Werkstücks ermöglicht und die entsprechenden Handhabungs- und Montageanforderungen des Benutzers erfüllt.
e) Die Installationsstruktur ist ein Mechanismus, der die gesamte Ausrüstung entsprechend dem Einsatzbereich des Benutzers und den Gegebenheiten vor Ort trägt.

| Gerätemodell | TLJXS-YB-50 | TLJXS-YB-100 | TLJXS-YB-200 | TLJXS-YB-300 |
| Kapazität | 50 kg | 100 kg | 200 kg | 300 kg |
| Arbeitsradius | 2500 mm | 2500 mm | 2500 mm | 2500 mm |
| Hubhöhe | 1500 mm | 1500 mm | 1500 mm | 1500 mm |
| Luftdruck | 0,5–0,8 MPa | 0,5–0,8 MPa | 0,5–0,8 MPa | 0,5–0,8 MPa |
| Drehwinkel A | 360° | 360° | 360° | 360° |
| Drehwinkel B | 300° | 300° | 300° | 300° |
| Drehwinkel C | 360° | 360° | 360° | 360° |






a) Es kann den Gravitationsgleichgewichtszustand von Materialien unterschiedlichen Gewichts realisieren, was für den präzisen Transfer von Materialien geeignet ist.
b) Bei unbelastetem Zustand, Volllast und der Bearbeitung unterschiedlicher Werkstücke kann das System die Gewichtsveränderung erfassen und den schwebenden Zustand der Last im dreidimensionalen Raum realisieren, was eine präzise Positionierung erleichtert.
c) Die Eigenschaften wie vollständige Ausgewogenheit und reibungslose Bewegung ermöglichen es dem Bediener, das Werkstück einfach zu handhaben, zu positionieren und zu montieren.
d) Der starre Arm ermöglicht es dem Manipulator, das Werkstück über Hindernisse hinweg zu transportieren; der horizontale Arm kann die Anforderungen an das horizontale Platzieren und horizontale Entnehmen von Materialien an entsprechenden Stellen erfüllen.
e) Das System kann stets die Höhe des Manipulatorkopfes beibehalten und eine hohe Arbeitsleistung gewährleisten.
f) Gelenkbremsvorrichtung mit mehreren Drehgelenken zur Materialaufnahme und -platzierung in einem weiten Bereich; ausgestattet mit einer Bremsvorrichtung, kann der Bediener die Bewegung des Manipulators jederzeit während des Betriebs unterbrechen.



Dieser Kraftmanipulator kann Werkstücke bis zu 500 kg heben. Der Arbeitsradius beträgt ca. 2500 mm, die Hubhöhe ca. 1500 mm. Je nach Werkstückgewicht sollte die kleinste Maschinengröße entsprechend dem maximalen Werkstückgewicht gewählt werden. Beispielsweise ist die Leistung eines 200 kg schweren Manipulators beim Heben eines 30 kg schweren Werkstücks stark beeinträchtigt. Das Gerät ist standardmäßig mit einem Druckluftbehälter ausgestattet, der den Arbeitszyklus auch bei Gasausfall ermöglicht. Gleichzeitig ertönt ein Alarm, um den Bediener zu warnen. Bei einem bestimmten Druckabfall aktiviert sich die Selbstverriegelungsfunktion, um ein Absinken des Werkstücks zu verhindern. Der Manipulator verfügt über ein Sicherheitssystem: Solange sich das Werkstück nicht in der sicheren Position befindet, kann der Bediener es nicht freigeben. Mit verschiedenen Sondervorrichtungen lassen sich mit diesem Kraftmanipulator vielfältige Bearbeitungsvorgänge problemlos durchführen.





